(This continues my series of posts on the exhubris tools I’m building, to
enable more people to use Hubris in their embedded systems.)
One of Hubris’s strongest features is its ability to handle crashes in drivers
and other application logic. It leaves the specific crash handling behavior up
to the application programmer through a mechanism called a supervisor.
In this post I’ll look at why I made this decision, how it works in practice,
and walk through the exhubris supervisor reference implementation,
minisuper. (Spoiler: it’s very small.)
So in my day-job over at Oxide we’ve built this nice embedded operating system
called Hubris. If you follow my blog, you’re probably aware of it.
I also build a lot of embedded electronics outside my day-job, and people
sometimes ask me (often excitedly!) if they’re using Hubris.
The answer so far is “no.” This is for a variety of reasons, but probably the
biggest: it’s actually quite difficult to use Hubris for anything if you don’t
want your code to live in the Oxide Hubris repo!
I would like to fix this, to enable other teams to use Hubris without having to
coordinate with Oxide (or even publish their source code!). I’m starting by
trying to address the needs of a single friendly customer: me.
As of this week I have it working, in a set of tools I call exhubris. It’s not
by any means done (or all that pleasant to use). I’m going to write some posts
about it, to help me think through the design process, and (more importantly!)
to solicit feedback from my readers on where they think things should go.
This first post starts with the part of Hubris most users encounter first: the
application configuration file, or appconfig.
The embedded platform we’ve built for firmware at Oxide is called Hubris.
It’s unusual for a microcontroller operating system, and probably the biggest
thing that makes it unusual is its use of separately-compiled tasks.
Most firmware applications mash all of their task and OS code together in a
common memory space, which is simple and efficient, but can lead to subtle bugs.
Hubris instead places bits of code in their own isolated memory areas, where
they can run (and crash!) separately. This requires that each bit be compiled as
a standalone program.
The CPUs we target don’t have virtual memory, so each of these separate programs
has to be laid out at a known place in the address space. This introduces some
challenges, and has prevented us from “just” using an off-the-shelf build
system.
This post will walk through the process of building a Hubris application from
source, from the perspective of the build system, and examine some of these
challenges and how we addressed them.
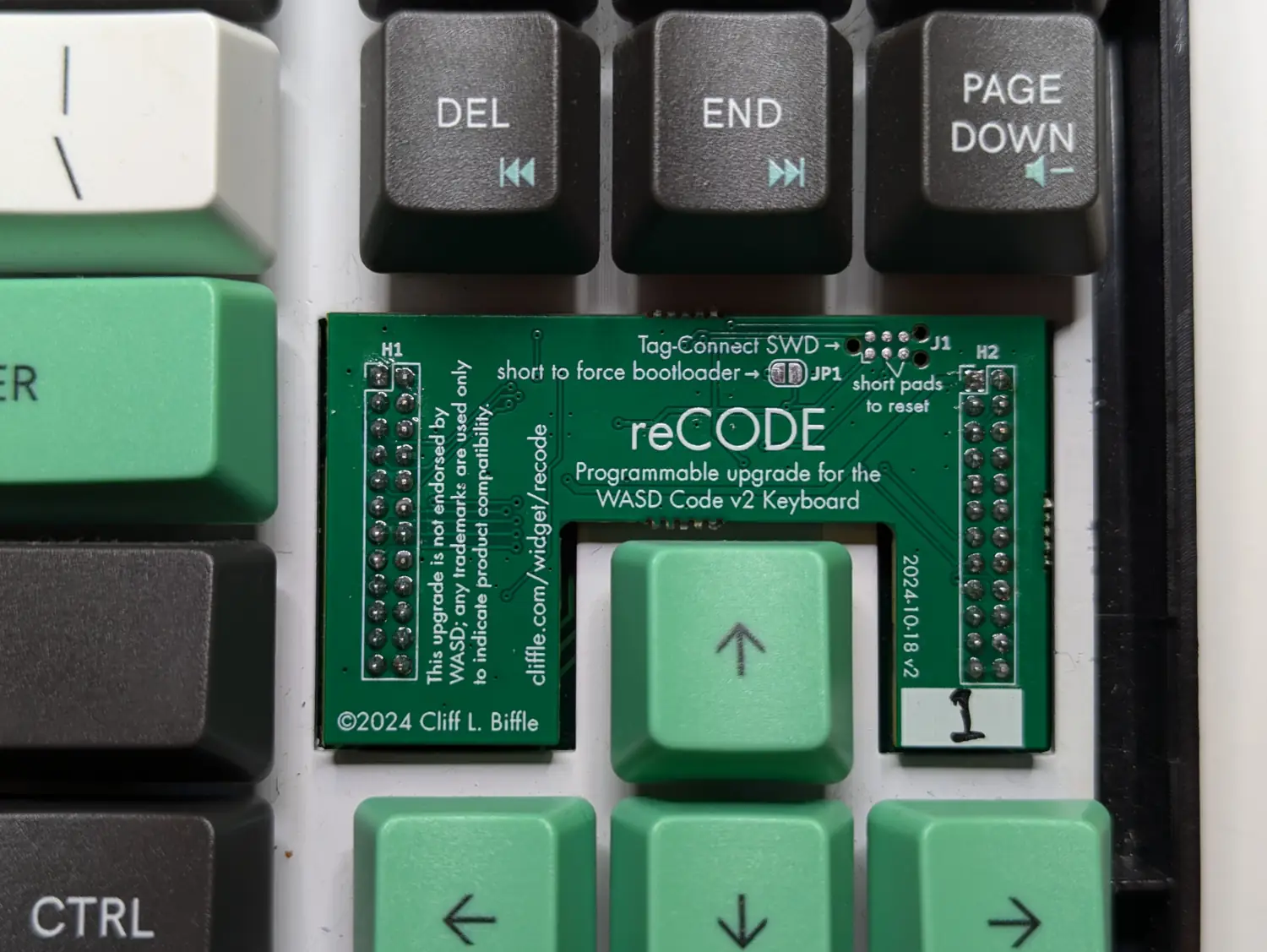
I have a WASD CODE v2 tenkeyless keyboard, which has been my daily driver for
work since about 2017. It’s a great keyboard… mechanically. But its control
electronics are fixed-function and don’t quite work the way I want — to say
nothing about fancy features like additional key layers.
So I fixed it. Now it runs QMK. (Or some bare-metal custom Rust firmware.)
This has let me…
Try out QMK without the expense (or waste!) of buying a whole new keyboard.
Add features that were missing in the original, like USB n-key rollover
(NKRO), 1 kHz polling, backlight fade effects, additional key layers, and key
macros.
Customize the part of the computer I interact with the most!
(If you’re from the rest of the world and would like one, contact me! I have to
set up each country separately, and I haven’t had time to do all
two-hundred-and-some-odd.)
If it’s out of stock on either store, join the waitlist and I’ll make more.
The user manual is pretty basic, but I’ll
flesh it out further if the boards sell!
After five years of development, something like seven art projects, one
commercial product, and many changes to the dark corners of the Rust
language, I’ve decided lilos is ready for a 1.0 release!
Some parts I’m excited about include:
As of this release, the lilos APIs are entirely cancellation-safe.
This release contains contributions from five other people, bringing the total
number of contributors to seven! (Want to be number eight? Come say hi!)
Thanks to one of those contributors, the operating system tests are now
running in CI on QEMU!
(For anyone who’s new, lilos is a tiny embedded operating system that uses
Rust async to allow complex multitasking on very limited microcontrollers
without requiring dynamic memory allocation. Read more about lilos on my
project page, where I link to the docs and provide a curated collection
of blog posts on the topic.)
See the release notes if you’re curious about what’s changed. If
you’ve got firmware written for an earlier version of lilos (particularly the
0.3.x series) and would like to update (you don’t have to!), those release notes
will guide you through the process. There have been some breaking API changes,
but I promise they’re all improvements.
I’m continuing to reflect on the past four years with Hubris — April Fool’s
Day was, appropriately enough, the fourth anniversary of the first Hubris user
program, and today is the fourth anniversary of the first kernel code. (I wrote
the user program first to help me understand what the kernel’s API wanted to
look like.)
Of all of Hubris’s design decisions, there’s one that gets a “wait what”
response more often than any other. It’s also proving to be a critical part of
the system’s overall robustness. In this post, I’ll take a look at our 13th and
oddest syscall, REPLY_FAULT.
We found a neat bug in Hubris this week. Like many bugs, it wasn’t a bug when
it was originally written — correct code became a bug as other things
changed around it.
I thought the bug itself, and the process of finding and fixing it, provided an
interesting window into our development process around Hubris. It’s very rare
for us to find a bug in the Hubris kernel, mostly because it’s so small. So I
jumped at the opportunity to write this one down.
This is a tale of how two features, each useful on its own, can combine to
become a bug. Read on for details.
I do a lot of electronics projects in my spare time, and I tend to try to make
reusable parts to save myself effort in the future. Because I have to order
ingredients in certain quantities, I often wind up with more than I need for my
project.
So I’ve opened a Tindie store, called Overengineered Widget
Laboratories. Right now there’s one product in the store, called
Keypad:GO. See, I built a sculpture last summer that needed to interact
with people through a phone-style keypad. The keypad interface part of it seemed
like something other people could use, so I made a few extras. This is a very
easy way to interface a keypad or small keyboard to an embedded electronics
project, because it handles all the basics for you — matrix scanning,
debouncing, key matrix collisions, etc.
It will also help you reverse engineer the keypad’s circuit, because often
cheap keypads arrive without good documentation. In the tiny flash of the
embedded microcontroller, I’ve packed a setup wizard that will walk you through
the process of setting up the keypad of your choice. All you need is a terminal
program. This is honestly my favorite part, and I demonstrate it in the video
below.
I’m trying to do something kind of unusual with lilos: in addition to almost
all the APIs being safe-in-the-Rust sense, I’m also attempting to create an
entire system API that is cancel-safe. I’ve written a lot about Rust’s async
feature and its notion of cancellation recently, such as my suggestion for
reframing how we think about async/await.
My thoughts on this actually stem from my early work on lilos, where I started
beating the drum of cancel-safety back in 2020. My notion
of what it means to be cancel-safe has gotten more nuanced since then, and I’ve
recently made the latest batch of changes to try to help applications built on
lilos be more robust by default.
So, wanna nerd out about async API design and robustness? I know you do.
I recently posted about my debugger for async Rust, which can
generate what I call “await-traces” for async code that’s suspended and not
currently running. I mentioned at the time that it appeared possible to get the
source code file name and line number corresponding to the await points, but
left that for future work.
In this post I’ll work through an example of why I’m so excited about this
technique, by building a real driver for a notoriously tricky bus one piece at a
time, using lilos.
(This is a section of the lilos intro guide that people seemed to like, so
to increase its visibility, I’m lifting it up into its own post and expanding it
a bit. I hope this is a useful companion piece to the post on async
debugging I posted this morning.))
Some documentation of Rust async and await has presented it as a seamless
alternative to threads. Just sprinkle these keywords through your code and get
concurrency that scales better! I think this is very misleading. An async fn
is a different thing from a normal Rust fn, and you need to think about
different things to write correct code in each case.
This post presents a different way of looking at async that I think is more
useful, and less likely to lead to cancellation-related bugs.
I’m a big fan of Rust’s async feature, which lets you write explicit state
machines like straight-line code. One of the operating systems I maintain,
lilos, is almost entirely based on async, and I think it’s a killer
feature for embedded development.
async is also popular when writing webservers and other network services. My
colleagues at Oxide use it quite a bit. Watching them work has underscored one
of the current issues with async, however: the debugging story is not great.
In particular, answering the question “why isn’t my program currently doing
anything” is very hard.
I’ve been quietly tinkering on some tools to improve the situation since 2021,
and I’ve recently released a prototype debugger for lilos: lildb. lildb
can print await traces for uninstrumented lilos programs, which are like
stack traces, but for suspended futures. I wrote this to help me debug my own
programs, but I’m publishing it to try and move the discussion on async
debugging forward. To that end, this post will walk through what it does, how it
derives the information it uses, and areas where we could improve things.
One of the nice things about the Rust programming language is that it
makes it easier to write correct concurrent (e.g. threaded) programs – to the
degree that Rust’s slogan has been, at times, “fearless concurrency.”
But I’d like to tell you about the other side of Rust, which I think is
under-appreciated. Rust enables you to write programs that are not concurrent.
This feature is missing from most other languages, and is a source of much
complexity and bugs.
“But wait,” you might be saying, “of course I can write code that isn’t
concurrent in Java or Python or C!”
Can you, though? You can certainly write code that ignores concurrency, and
would malfunction if (say) used from multiple threads simultaneously. But that’s
not the same thing as writing code that isn’t concurrent – code that simply
can’t be used concurrently, by compiler guarantee.
In Rust, you can. Let’s look at why you can do it, and why it’s awesome.
One of the common complaints I hear from systems programmers who try Rust is
about mutexes, and specifically about the Rust Mutex API. The complaints
usually go something like this:
They don’t want the mutex to contain data, just a lock.
They don’t want to have to manage a “guard” value that unlocks the mutex on
drop – often, more specifically, they just want to call an unlock operation
because they feel like that’s more explicit.
These changes would make the Rust mutex API equivalent to the C/Posix mutex API.
In one case I’ve seen someone try to use Mutex<()> and trickery to fake it.
There’s a problem with this, though: these two aspects of Mutex’s design are
inextricably linked to one another, and to Rust’s broader safety guarantees –
changing either or both of them will open the door to subtle bugs and
corruption due to data races.
A C-style mutex API consisting of some bundle of implicitly guarded data, plus
lock and unlock functions, isn’t wise in Rust because it allows safe code to
easily commit errors that break memory safety and create data races.
Perhaps controversially, I’d argue that this is also true in C. It’s just more
obvious in Rust, because Rust rigorously distinguishes between the notion of
“safe” code that cannot commit such errors, and “unsafe” code that can commit
such errors if it wishes. C does not make this distinction, and as a result, any
code using a mutex in C can trivially produce serious, potentially exploitable,
bugs.
In the rest of this post I’ll walk through a typical C mutex API, compare with a
typical Rust mutex API, and look at what happens if we change the Rust API to
resemble C in various ways.
Last week I gave a talk at the Open Source Firmware Conference about some of the
work I’m doing at Oxide Computer, entitled On Hubris and Humility. There is a
video of the talk if you’d like to
watch it in video form. It came out pretty alright!
The conference version of the talk has a constantly animated background that
makes the video hard for some people to watch. OSFC doesn’t appear to be
bothering with either captions or transcripts, so my friends who don’t hear as
well as I do (or just don’t want to turn their speakers on!) are kind of out of
luck.
And so, here’s a transcript with my slides inlined. The words may not exactly
match the audio because this is written from my speaker’s notes. And, yes, my
slides are all character art. The browser rendering is imperfect.
I’ve also written an epilogue at the end after the initial response to the talk.
(I’ve updated this pattern, since a lot has changed since 2020. The
recommendations here should be ready for the Rust 2024 edition, and are closer
to correct in a post-pointer-provenance world.)
Here’s another useful Rust pattern. Like the Typestate Pattern
before it, I wrote this because I haven’t seen the sort of obsessively nerdy
writeup that I wanted to read. And, as with the Typestate Pattern, I didn’t
invent this — I’m merely documenting and generalizing it.
In this series so far, we’ve taken a C program and converted it into a faster,
smaller, and reasonably robust Rust program. The Rust program is a recognizable
descendant of the C program, and that was deliberate: my goal was to compare and
contrast the two languages for optimized code.
In this bonus section, I’ll walk through how we’d write the program from scratch
in Rust. In particular, I’m going to rely on compiler auto-vectorization to
produce a program that is shorter, simpler, portable, and significantly
faster… and without any unsafe.
In part 4 we took the unsafe code that deals with treating
arrays of f64 as arrays of vectors, and we corralled it into a safe API.
In this installment, we’ll look at the remaining reasons why advance is an
unsafe fn, and make it safe — not by removing all the unsafe, but by
narrowing it down.
This one’s a doozy — the remaining changes to advance are hard to
separate, so I’ve packed them all into one section. Now is probably a good time
to refill your coffee.
In part 3 we found that our use of uninitialized memory was a premature
optimization that didn’t actually improve performance. This left us with only
one remaining unsafe function, but, boy, is it a doozy.
In this part, I’ll begin the process of corralling its unsafe optimizations
into more clearly safe code, by replacing arbitrary pointer casting with a
lightweight abstraction.
In part 2 we introduced Rust references, and this was enough to convert
one of our inner functions into safe Rust.
The others are still unsafe. There are several reasons for this. In this, the
briefest of sections, we’ll tackle the easiest one: deliberate use of
uninitialized memory.
In the first part of this tutorial we took an optimized C program and
translated it to an equivalent Rust program, complete with all the unsafe
weirdness of the original: uninitialized variables, pointer casting and
arithmetic, etc.
In this section, we’ll begin using Rust’s features to make the program
incrementally more robust, while keeping performance unchanged.
Specifically, we’ll begin by introducing references.
In this part of the series, we’ll take a grungy optimized C program and
translate it, fairly literally, into a grungy optimized unsafe Rust program.
It’ll get the same results, with the same performance, as the original.
I’ve been studying WebAssembly recently, which has included porting some of my
m4vga graphics demos. I started with the Rust and WebAssembly
Tutorial, which has you use fancy tools like wasm-pack,
wasm-bindgen, webpack, and npm to produce a Rust-powered webpage.
And that’s great! But I want to know how things actually work, and those tools
put a lot of code between me and the machine.
In this post, I’ll show how to create a simple web graphics demo using none of
those tools — just hand-written Rust, JavaScript, and HTML. There will be
no libraries between our code and the platform. It’s the web equivalent of bare
metal programming!
The resulting WebAssembly module will be less than 300 bytes. That’s about
the same size as the previous paragraph.
The typestate pattern is an API design pattern that encodes information about
an object’s run-time state in its compile-time type. In particular, an API
using the typestate pattern will have:
Operations on an object (such as methods or functions) that are only available
when the object is in certain states,
A way of encoding these states at the type level, such that attempts to use
the operations in the wrong state fail to compile,
State transition operations (methods or functions) that change the
type-level state of objects in addition to, or instead of, changing run-time
dynamic state, such that the operations in the previous state are no longer
possible.
This is useful because:
It moves certain types of errors from run-time to compile-time, giving
programmers faster feedback.
It interacts nicely with IDEs, which can avoid suggesting operations that are
illegal in a certain state.
It can eliminate run-time checks, making code faster/smaller.
This pattern is so easy in Rust that it’s almost obvious, to the point that
you may have already written code that uses it, perhaps without realizing it.
Interestingly, it’s very difficult to implement in most other programming
languages — most of them fail to satisfy items number 2 and/or 3 above.
I haven’t seen a detailed examination of the nuances of this pattern, so here’s
my contribution.
If this isn’t your first time visiting my blog, you may recall that I’ve spent
the past several years building an elaborate microcontroller graphics
demo using C++.
Over the past few months, I’ve been rewriting it — in Rust.
This is an interesting test case for Rust, because we’re very much in C/C++’s
home court here: the demo runs on the bare metal, without an operating system,
and is very sensitive to both CPU timing and memory usage.
The results so far? The Rust implementation is simpler, shorter (in lines of
code), faster, and smaller (in bytes of Flash) than my heavily-optimized C++
version — and because it’s almost entirely safe code, several types of
bugs that I fought regularly, such as race conditions and dangling pointers, are
now caught by the compiler.
It’s fantastic. Read on for my notes on the process.
This is a position paper that I originally circulated inside the firmware
community at X. I’ve gotten requests for a public link, so I’ve cleaned it up
and posted it here. This is, obviously, my personal opinion. Please read the
whole thing before sending me angry emails.
tl;dr: C/C++ have enough design flaws, and the alternative tools are in good
enough shape, that I do not recommend using C/C++ for new development except in
extenuating circumstances. In situations where you actually need the power of
C/C++, use Rust instead. In other situations, you shouldn’t have been using
C/C++ anyway — use nearly anything else.
I did this because it was an immense technical challenge. Read on for details,
including links to a series of blog posts I wrote examining the code in detail.
LRtDW is a series of articles putting Rust features in context for low-level C
programmers who maybe don’t have a formal CS background — the sort of
people who work on firmware, game engines, OS kernels, and the like. Basically,
people like me.
I’ve added Rust to my toolbelt, and I hope to get you excited enough to do the
same.
Let the compiler do the work: a bonus section that looks at how
we’d write the program idiomatically in native Rust, and rely on
auto-vectorization to make it fast.
Now that Hubris has gotten some attention, people sometimes ask me if my
personal projects are powered by Hubris.
The answer is: no, in general, they are not. My personal projects use my other
operating system, lilos, which predates Hubris and takes a fundamentally
different approach. It has dramatically lower resource requirements and allows
more styles of concurrency.